乗船レポート(8) ロボ発進 [ シリーズ実況 Old..]


前回の写真、間違ってました(汗)
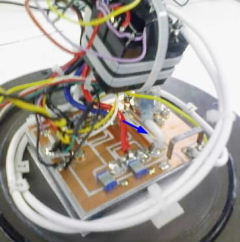
こちらが正解。写真1枚目がトラぶった回路。
失敗があると、こういう写真が増えます。
本当は揺れる洋上で工作作業はしたくないのですよ(泣)
さて、そのトラブルも翌朝までにはなんとか修復して、
いよいよ待ちに待った水中ロボット「かいこう」の登場です。
写真2枚目の黄色いロボットは、海底が近づくと親ガメ・小ガメよろしく、
上側と下側に分離して調査します。調査が終わると合体して、
再び洋上に戻ってきます。
ロボットと言ってもラジコンではなく、リモコンです。船と親ガメ・小ガメは
ケーブルでお互いが繋がっていて、水の中を移動します。
でもケーブルがついているのでロボットは電池切れの心配なし。
また海底のカメラ映像も船上へ生中継されます。
ここ数日忙しい毎日で、洋上からのブログも更新する時間がありませんが、
トラブルにもめげず、なんとか思うように海底調査ができるようになって
きました。
今日も夕方の空が綺麗でした。写真3枚目です。うまくいってもいかなくても
夕日は綺麗に空を照らします。明日もがんばります!
※ちなみに「水中ロボ」とはいわず「無人探査機」っていいます。
親ガメ・小ガメも「ランチャー」「ビークル」って呼びますし。
また合体ともいわず「結合」といいます。
全部、ちょっとかっこいい呼び方です。

海と地球の本・DVD
Amazon”非”ライブリンクです。手動でおもしろそうな本を選んでいます
※防災を劇にする >> こちら
")
日本列島大変動: 巨大地震、噴火がなぜ相次ぐのか (ポプラ新書 こ 3-1)")

※防災を劇にする >> こちら
おぼえてね!あぶないときのおやくそく―年少向防災かみしばい (教育画劇のかみしばい)
- 出版社/メーカー: 教育画劇
- 発売日: 2011/09/01
- メディア: 大型本
(140)日本列島大変動: 巨大地震、噴火がなぜ相次ぐのか (ポプラ新書 こ 3-1)
- 作者: 後藤 忠徳
- 出版社/メーカー: ポプラ社
- 発売日: 2018/04/10
- メディア: 新書
- 作者: 後藤 忠徳
- 出版社/メーカー: ベレ出版
- 発売日: 2013/10/22
- メディア: 単行本

アルバム
| ||
|

※シリーズ実況や連載の続きは、下の「連載・カテゴリーの紹介」から探してね。



